研究開発
私たちがドローンの研究開発を始めた頃は、ドローン用モータやプロペラはありませんでした。そのため、自分たちでモータを設計し、プロペラを削り、ひとつひとつの部品を半田付けして制御基板を作りました。今日、部品を買ってきてドローンを組み立て、飛ばすことは簡単になりました。しかし業務で使うことを考えれば、安全性の確保をはじめとした解決事項が山積みであることは明確です。弊社の研究セクターの業務例を紹介します。
屋内飛行技術
non-GPS enviroment
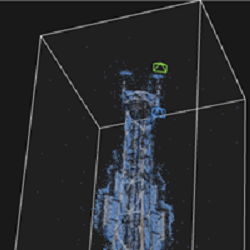
屋内環境の飛行技術は多岐にわたります。屋外ではGPSを活用することで自分の位置が分かりますが、屋内ではGPSの信号が捕まえられません。そのため、飛行環境に合わせた技術を開発する必要があります。右の写真は、2013年に開発した高速画像処理を用いた自己位置推定の例です。機体から床を撮影した画像を処理することにより、右側のように床の模様を抽出し、 その変化を追いかけることによって、ドローンの姿勢変化や移動距離を割り出すことができます。この処理を当時わずか10gのモジュールで実現することに成功し、現在でも進化を続けています。

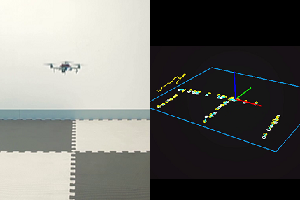
一方で、ドローンが移動しながら地図を作る地図生成、また既存の地図の中を移動する地図有り飛行の研究開発もしています。衝突を回避しながら飛行する技術は、複雑な構造の工場などの現場の中では必須です。また、室内の設備が変化する環境で安全に飛行するニーズは今後大幅に増加すると考えられます。 右は障害物の多い雑然とした通路を空間認識しながら移動する例です。衝突を回避することは勿論、自分の位置を認識したり、自分で飛行経路を立てる処理も開発しています。
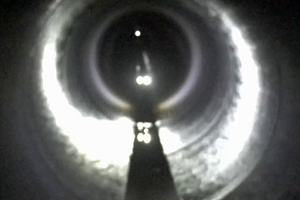
このような技術の集大成として様々な開発案件の実績を積み重ねてきました。都合上、公開可能な事例は少ないですが、成果の一つとして下水道を自動飛行した際の写真(右)をご紹介します。真っ暗な地下空間を、フラッシュを焚きながら壁面撮影をする点検機P400は、地図無しの管路内を飛行することができます。段差やカーブ、堆積物を乗り越えて、出口まで飛行するために、様々な技術を組み合わせています。
屋外飛行と安全性の追求
outdoor flight and safty

屋外飛行の飛行技術の中には屋内で培った技術が沢山あります。通常はGPSを使って飛行しますが、精度の高い離着陸や障害物回避には屋内飛行の技術を活用します。また、インフラ点検では衝突防止や形状認識などGPS以外の技術に注力して飛行するシステムを利用しています。右の写真は鉄塔点検の様子です。インフラ点検では万が一の事故がインフラそのものをを停止させるリスクを抱えています。社内で開発している様々な技術を組み合わせ、2重にも3重にも安全対策をすることで、安全性の高い点検を実現します。

社内では、常に安全性の向上のための研究を続けています。安全に完璧はありません。だからドローンが落ちないことについて保証することは困難ですが、 だからこそ一歩先の安全性を求めて実験を続けています。
実験中の突風のデータを収集し続け、様々な場所でのセンサの反応を調べ、より多くの環境で、より安全な飛行が実現できるよう日々研究を進めています。
また、他社機体を運用した際の事故調査も行っています。幅広く調査を行うことで業界全体の安全性が向上すると考えています。
データ分析
data analytics

弊社ではドローンの飛行で取得したデータの解析も行っています。日々取得される農業のデータや構造物の点検データなど、分析の対象は様々です。弊社でセットアップした機材だからこそ多角的に分析できる事象も多く、 より幅広い分析サービスを提供できるよう研究開発を進めています。また、お客様設備に既存のデバイスと連携したデータ分析にも対応します。お気軽にご相談ください。
 ENGLISH
ENGLISH